Fully Autonomous Underwater Scanning
A commitment to innovation and sustainability
ŪWAI robotics develops autonomous underwater vehicles (AUV) to support the aquaculture industry.
Our Work
Empowering sustainable aquaculture and fisheries to scale and enabling effective management of our pristine coastline in NZ and globally.
Our smart drones and data processing services provide 3D colour scanning/recognition of underwater surfaces / objects / organisms to sub-mm accuracy using novel AI approaches to automatically scan for crop health, condition, biofouling, or conditions of underwater structures.
Our approach is unique in that we have developed an advanced AUV simulator which enables rapid prototyping of novel navigation, inspection patterns and AI-based image recognition. This software-in-the-loop code runs line-for-line in both the simulator and underwater drone. This, together with our extensive experience in AI and developing AUVs, gives us a significant advantage, not only in NZ, but internationally.


Collectively we will have all the necessary capability in sensing / integration, marine engineering, AUV design, control systems, 3D vision analysis, AI (especially deep learning expertise), autonomous software, and field deployment to enable rapid prototyping and development of novel applications.
In addition to our scanning and data collection, we are developing the ability to collect samples using a gripper attached to the robot, saving time and money over the current labour-intensive approaches.
Mussel Farm Surveying

Salmon Net Surveying
Wharf Biosecurity Inspections

Contact Us
Blog
-
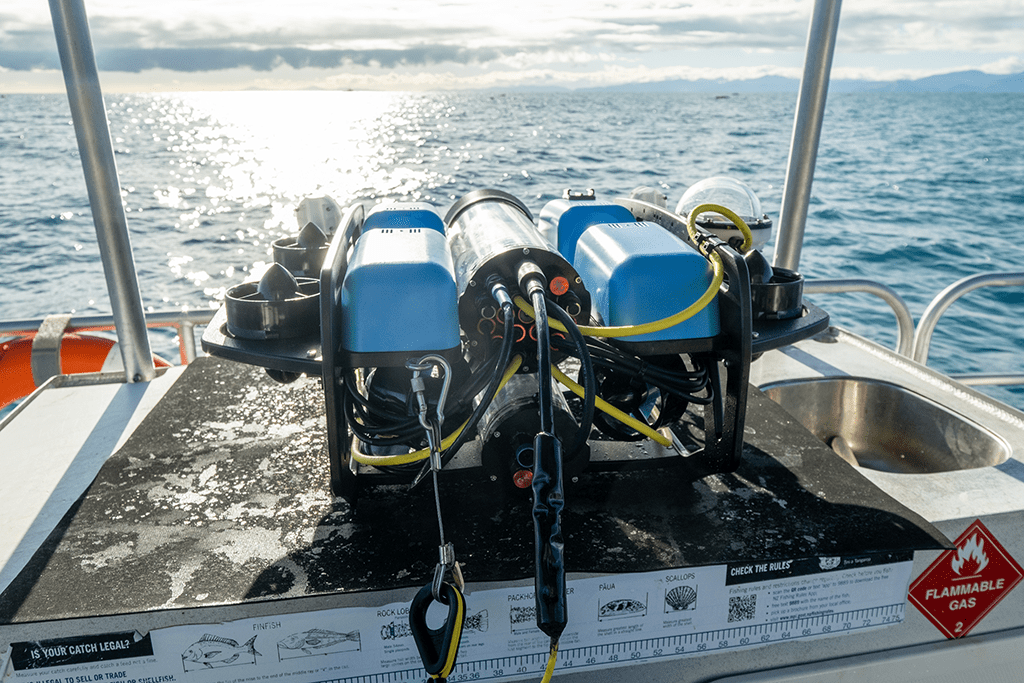
The ŪWAI Robotics group has developed a successful autonomous underwater vehicle (AUV) which automatically scans mussel farms while collecting mussel samples.
-
See how the ŪWAI Robotics ROV and machine learning can be combined to transform the scallop fishing industry. This MBIE funded project and partnership with NIWA explores non-destructive and sustainable alternatives to dredging.
-
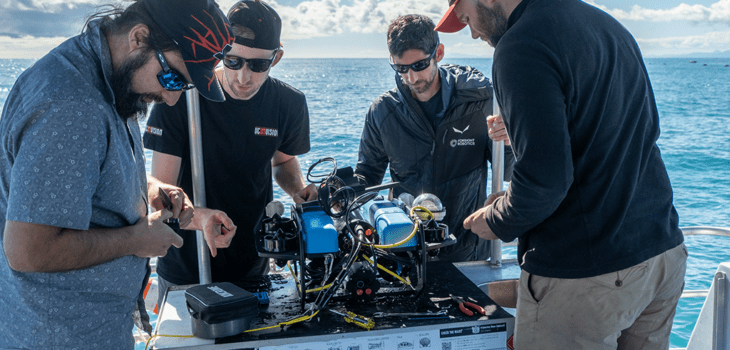
Tim and Timothy talk about the ŪWAI Robotics ROV which has recently been taken to the Marlborough Sounds for fieldwork. The ROV has successfully scanned mussel lines in mussel farms as well as taking mussel samples from the ropes. Tim and Timothy explain the benefits of using an ROV in aquaculture. Tim Rensen PhD Candidate…
-
The ŪWAI Robotics team had a fieldtrip to Nelson in March. It was very successful with great weather over the week in Nelson and lots of data collected. The ROV scanned mussel rope lines at the mussel farms in Tasman Bay. Autonomous scanning was refined to the point where we can accept early adopters. This…
-
In November 2023 the ŪWAI Robotics team funded by SfTI travelled to Rotorua for a workshop which ran over three days at Novotel Lakeside and Te Puia. We listened to amazing speakers including Sir Ashley Bloomfield and Professor Rangi Mātāmua. One morning our researchers Tim Rensen and Rory Clifford decided to film our underwater robot…